Lecture 1 - Introduction to Reinforcement Learning [Notes]
Published:
Lecture Details
- Title: Introduction to Reinforcement Learning
- Description: The lecture notes are based on David Silver’s lecture video.
- Video link: RL Course by David Silver - Lecture 1
- Lecture Slides: Slides
Credits: All images used in this post are courtesy of David Silver
Reinforcement Learning: Characteristics
There is no supervision, only a reward signal. Therefore, defining the reward function properly is of paramount importance.
Feedback may not be instantaneous. That is, the current action may bring positive rewards only after long time. Example: Studying hard and diligently while sacrificing play time may seem arduous and tiring at first but it brings a positive reward later on.
The decision process making is sequential. That is, the order of operations and input matters.
The actions which the agent take will affect the subsequent actions and data it receives. Example: Depending on whether the agent decides to move in the left direction or right, the data received in future interactions may be completely different.
Rewards:
A reward is a scalar feedback signal. Note the word scalar. The reward should be simple enough to be represented in a scalar form. Though using complex rewards is possible, it would only add unnecessary complexity to the algorithm. Hence, rewards should be scalar in nature.
The agent’s job is to maximise the cumulative reward.
Reward hypothesis: All goals can be described by maximisation of expected cumulative rewards.
The reward hypothesis is true for the case of reinforcement learning and hence, it is the duty of the programmer to choose a reward function which would satisfy every goal when it is maximised.
Example:
Helicopter performing stunts will get a +ve reward if it follows the desired trajectory. It will get a -ve reward for crashing or missing the trajectory.
A game playing agent will receive a positive reward for increasing the score and a negative reward for decreasing the score.
Sequential decision making:
Note that, rewards shouldn’t always be greedy in nature. Getting the best reward at present time step may not lead to the best cumulative reward.
Example: A financial investment (initial loss) may lead to increase in bank balance after many years.
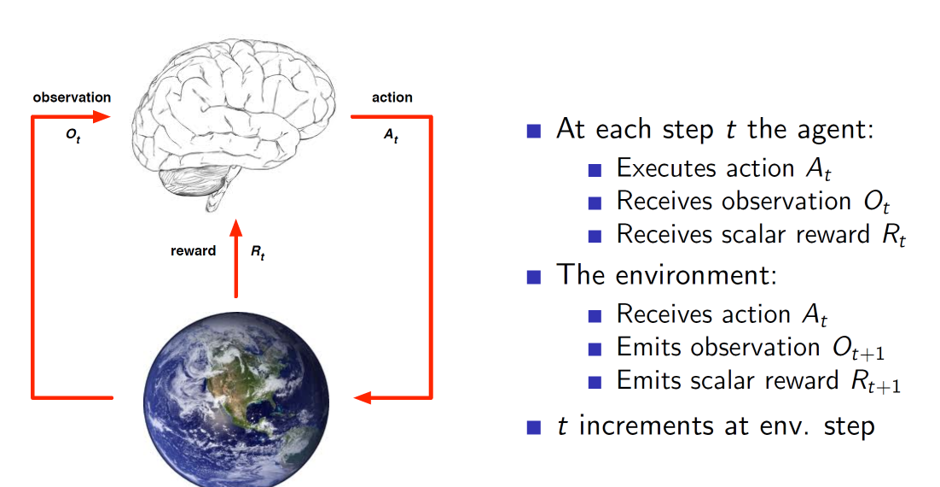
Agent and environment interaction:
History and state:
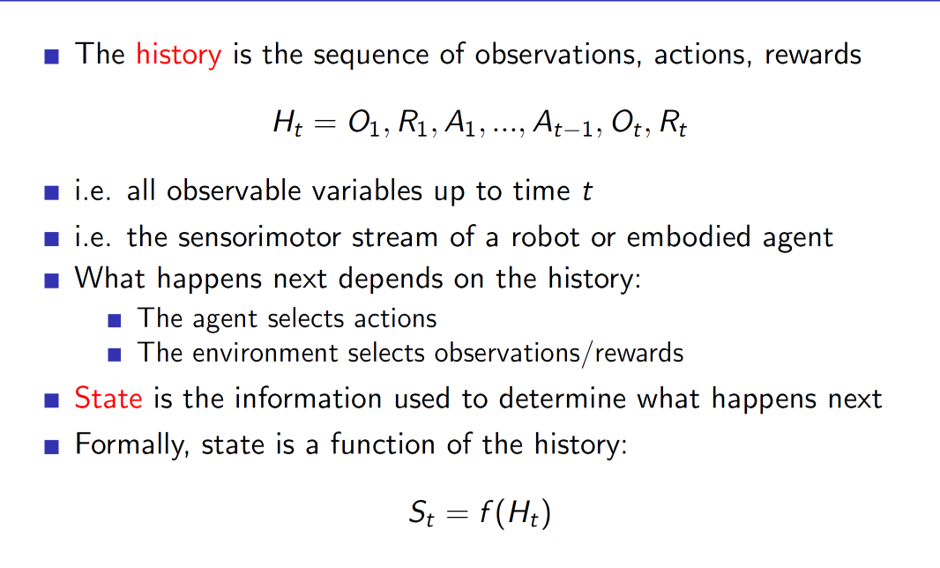
Important: State is a function of history
This means that the definition of state is dependent on the programmer. A state may be defined as the last 4 observations, actions and rewards, only the last observation, actions, rewards or the entire history or any other combination which the programmer desires.
Environment state: Environment state is the environment’s internal representation. Depending on this, it will spit out the next observation and reward to the agent.
Agent state: Agent state is the agent’s internal representation. This is used by the agent to pick the next action.
Markov states:
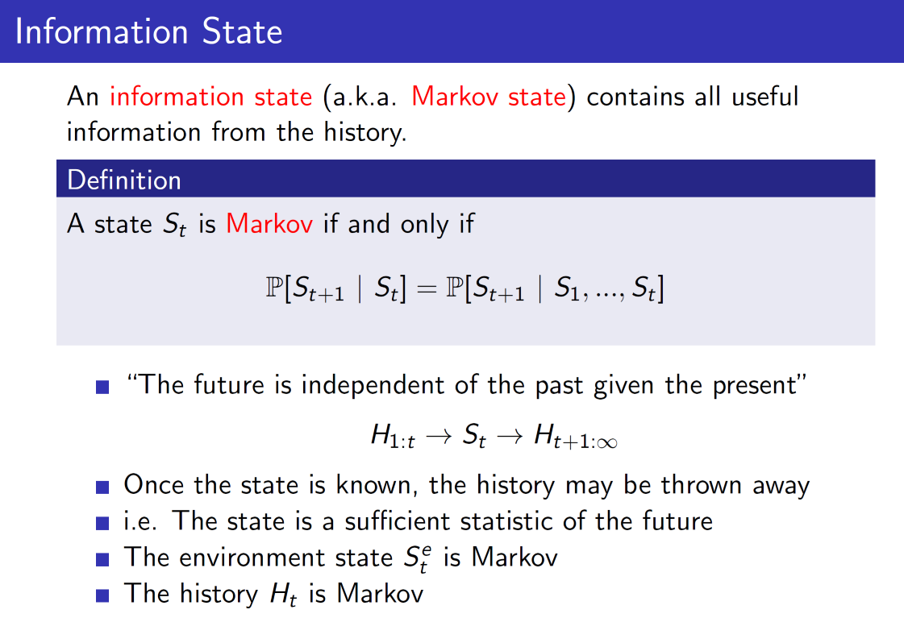
A state is a Markov state if and only if the next state can be determined purely based on the present state. That is, to determine S~t+1,~ only S~t~ is required, and any other previous states are not required.
But note that here the definition of S is dependent on the programmer. It could mean last 4 observations, rewards, actions or any other combination.
Example:
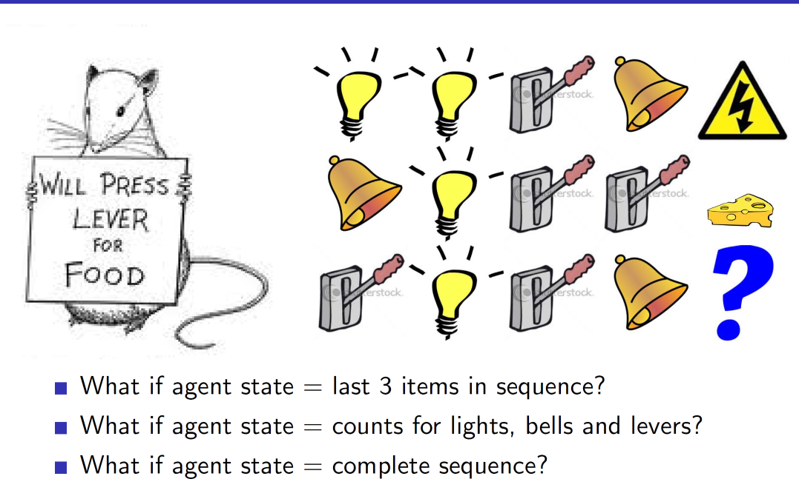
In the example we can see that depending on the definition of the state, the predicted output may change.
Fully observable environments:
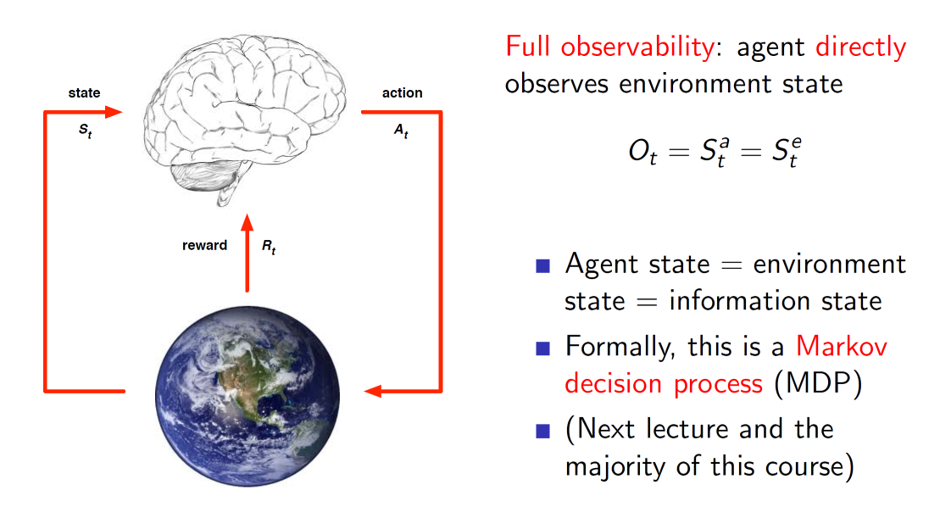
The environments which can be fully or directly observed by the agent are called fully observable environments. Here, the agent has access to the all the relevant and required information present in the environment. Hence, the agent state is same as environment state in this case.
Taking decisions in such an environment is called as Markov Decision Process.
Partially observable environments:

In partially observable environments, the agent won’t have access to entire required information. Hence, the environment state is different from the agent state.
In such a case, the agents need to construct their own representations. This can be done trivially by considering the entire history. Other common ways are to use belief states, i.e probability of it being in some state and choosing the one which is most probable.
Example: While playing poker, if we are able to count cards, we can probabilistically determine the chance of different cards present in different players’ hands.
Another way is to use neural networks to predict the next state.
Main components of RL agent:
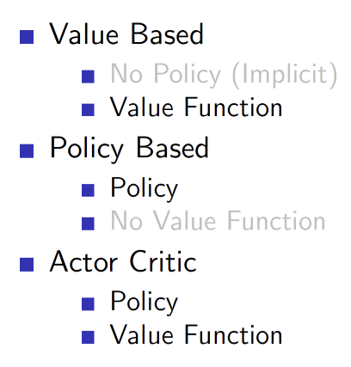
Policy: Agent’s behaviour function.
Value: Goodness or badness of a state
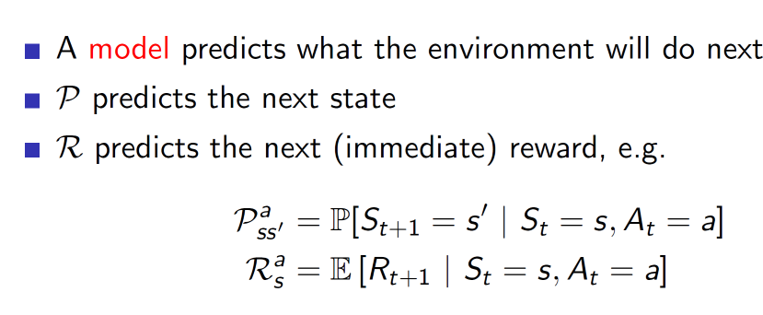
Model: Agent’s representation of the environment
Policy:
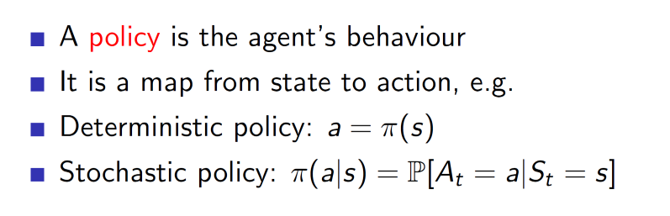
Policy can be deterministic, i.e it will ouput the exact action to take or it can be stochastic; it outputs the probability of taking different actions.
Value:
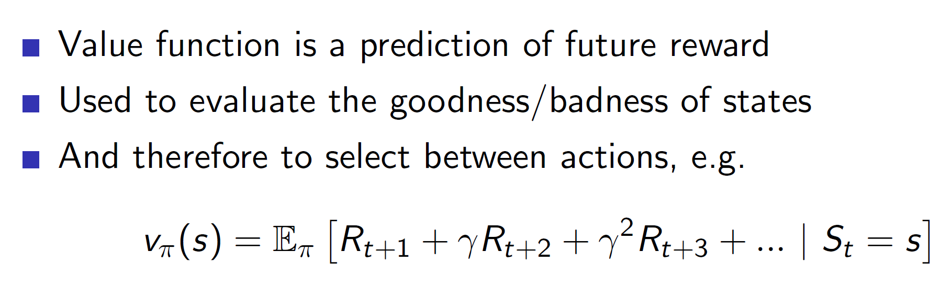
In value function, notice that the future rewards have a increasing gamma parameter with it. It is basically used to reduce the impact of the future rewards. That is, the rewards which are im../../images/rl/l1-dste are more important than the rewards which are far away. Hence, the rewards which are many time steps away should be given lesser importance as there is more uncertainty. This is handled using the gamma parameter which is a value less than 1.
Model:
Example:
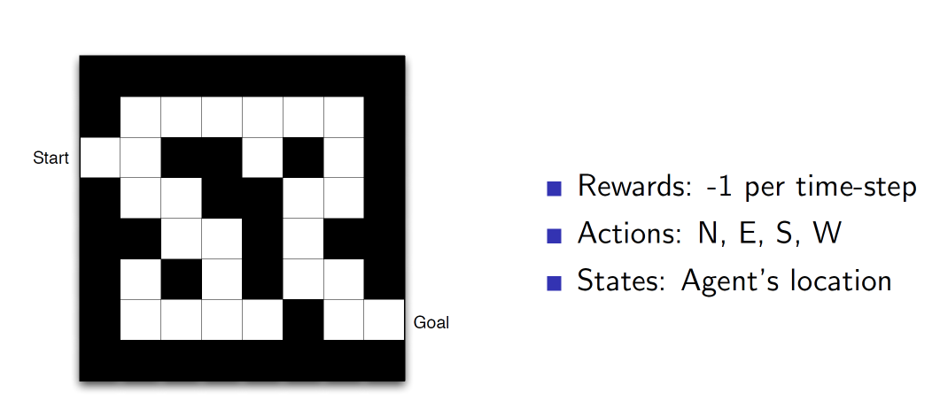
Maze example using Policy alone:
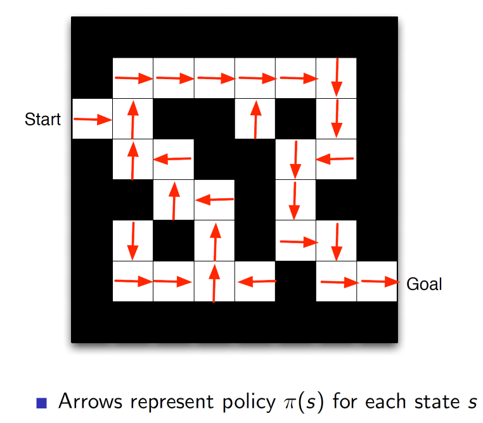
Here we can see that at each state the policy is showing the direction in which the agent should move.
Maze example using value function:

Here, at each state, the value function will show the goodness/badness of the state. I.e, the start state is a bad possible state as it is far away from the goal, hence a value of -16. Given such a value function, we can choose which state to move to. In this example, we would move in the direction which gives a higher value.
Maze example based on model:
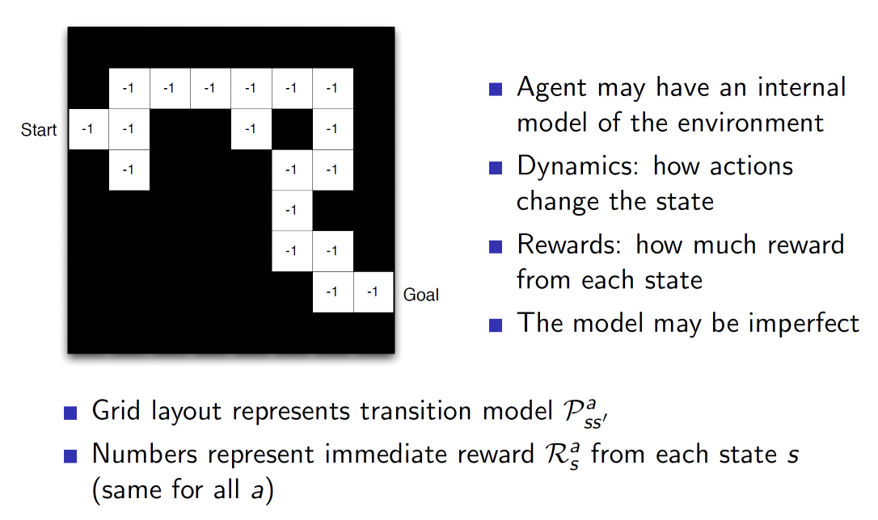
In case of model representation, every grid (state) is showing the reward for that state alone. The model will use this reward to calculate the cumulative reward and take actions accordingly.
Categorization of RL agents:
Exploration vs Exploitation:
There is an important trade-off between exploration and exploitation. If the agent is to use the current available knowledge to make a decision it is known as exploitation but then the agent will never discover new things and get even higher rewards.
Example: If we always go to restaurants, we know then even though we are getting good, scrumptious food, but trying out new restaurants may lead to finding dishes which are even more delicious.